
10.06.2026 à 11:20
TW, kWh, mAh… Quelle est la différence entre énergie et puissance ?
Nolwenn Le Pierrès, Professeure des Universités en énergétique, Université Savoie Mont Blanc
Texte intégral (3560 mots)
Dans le langage courant, on confond trop souvent les notions d’énergie et de puissance. Or, ces notions sont au cœur d’enjeux clés pour nos sociétés, comme nous en prenons conscience de façon aiguë lorsque des tensions géopolitiques viennent brutalement renchérir le prix de l’énergie jusqu’à remettre en cause nos modes de vie… On fait le point sur ces deux grandeurs, le lien entre elles et les unités pertinentes pour les quantifier.
L’énergie est quelque chose que l’on peut transformer, accumuler et échanger. On peut faire un parallèle entre l’énergie et une quantité de matière, par exemple une certaine quantité d’eau. Si on considère une baignoire, de l’eau peut y entrer (la baignoire se remplit), de l’eau peut y être stockée et de l’eau peut en sortir (la baignoire se vide). De façon analogue, de l’énergie peut pénétrer dans un système, y être stockée et en sortir. Le contenu énergétique correspondant est quantifié en joules (dont le symbole est la lettre J), selon le système international d’unités. Le joule a été défini comme l’énergie fournie pour déplacer un point d’une distance d’un mètre (l’unité internationale de mesure de la distance) en appliquant une force d’un newton (l’unité internationale de mesure de la force).
Parallèlement, la puissance représenterait la vitesse à laquelle la baignoire se remplirait ou se viderait, donc le débit d’eau entrant ou sortant : la puissance représente l’amplitude des échanges d’énergie. Ainsi, on peut remplir une baignoire plus ou moins vite, par exemple en ajoutant un kilogramme d’eau par seconde, ou plus lentement en y ajoutant seulement 50 grammes d’eau par seconde. De la même façon, de l’énergie peut être fournie à un système plus ou moins vite, en y ajoutant un joule par seconde ou 500 joules par seconde : c’est ce qui définit la notion de puissance échangée, quantifiée en watts (W, l’unité dérivée du système international pour la puissance).

Le lien entre la puissance et l’énergie est donc le temps :
Puissance = énergie/temps,
ce qui équivaut à : énergie = puissance x temps.
En unités internationales, un watt est donc égal à un joule par seconde.
La puissance ne peut pas être stockée : c’est un flux, de la même façon qu’on ne peut pas stocker un écoulement d’eau, seulement l’eau elle-même. En revanche, on peut adapter la capacité d’un système à échanger une puissance plus ou moins élevée, de la même façon qu’on peut adapter le diamètre du tuyau d’eau entrant ou sortant d’une baignoire.
Les multiples
Comme pour toutes les unités, les unités de puissance et d’énergie existent également avec des multiples. Les plus utilisés sont rassemblés dans le tableau ci-dessous.

Par exemple, un gigajoule = 1 GJ = 1 x 109 J = 1 000 000 000 J. Cela semble être beaucoup d’énergie, mais correspond seulement à l’énergie solaire reçue chaque année par une dalle de terrasse de 50 cm de côté à Brest !
Ou 1 microwatt = 1 µW = 1 x 10-6 W = 0,000 001 W. Cette toute petite puissance correspond approximativement à la puissance consommée par les montres à quartz (attention, les montres connectées récentes, qui font beaucoup plus que de donner l’heure, sont également plus gourmandes !).
Les unités de mesure d’énergie que l’on retrouve dans la vie quotidienne
Comme un joule représente une très petite quantité d’énergie, dans la pratique, nous utilisons plus souvent d’autres unités pour quantifier l’énergie, en fonction du domaine dans lequel nous évoluons et des quantités exprimées. Toutes ces unités sont « traduisibles » en joules, selon un coefficient de conversion.
Dans le domaine de l’alimentation, ou parfois encore celui des transferts thermiques, la calorie (cal) est couramment utilisée, de même que la kilocalorie (kcal, égale à 1 000 calories).
1 calorie = 4,18 joules environ.
La calorie a été mesurée historiquement comme la quantité d’énergie (de chaleur) nécessaire pour élever de 1 °C la température d’un gramme d’eau liquide à pression et température ambiantes. Elle est donc encore parfois utilisée par les thermiciens.
Dans la vie courante, on compte le nombre de calories apportées au corps par les aliments, et on peut les comparer aux calories dépensées lors de nos différentes activités…

Une autre unité d’énergie très courante est le kilowatt-heure (ou kWh) : elle correspond à l’énergie échangée lors d’un transfert d’une puissance d’un kilowatt pendant une heure.
Comme
1 kilowatt-heure = 1 kilowatt x 1 heure = 1 000 watts x 3 600 secondes,
on en déduit que
1 kilowatt-heure = 3 600 000 joules = 3 600 kilojoules = 3,6 mégajoules.
Cette unité est également couramment utilisée lors d’un achat d’énergie, notamment sur la facture électrique ou de gaz.

C’est aussi en kilowatt-heure que les capacités des batteries des véhicules électriques sont quantifiées : les voitures présentent maintenant des capacités généralement entre 30 et 100 kilowatts-heures. Dans ce cas, cette capacité représente la « taille du réservoir », qui peut être plus ou moins rempli.

À plus grande échelle, on utilise des unités énergétiques plus grandes, par exemple la tep (tonne équivalent pétrole), qui a remplacé au cours du XXᵉ siècle la « tec » (tonne équivalent charbon) : cette unité représente la quantité d’énergie (appelée aussi pouvoir calorifique) produite par la combustion d’une tonne de pétrole brut « moyen », soit 41,868 gigajoules. Elle permet de quantifier de grandes quantités d’énergies avec un ordre de grandeur plus intuitif que des milliers de milliards de joules… Par exemple pour la France, l’importation de pétrole brut a représenté 45,6 Mtep en 2024.
Attention, on retrouve parfois les capacités de piles ou batteries quantifiées en ampères-heures (Ah) ou en milli-ampères-heures (mAh). Cette unité ne représente pas en tant que telle une quantité d’énergie. Pour être homogène à une énergie, il faut multiplier cette « capacité » par la tension avec laquelle le courant est échangé par la pile. Ainsi, dans le cas de piles fonctionnant à tension fixée (ce qui est souvent le cas dans de petits systèmes électroniques), il y a bien une proportionnalité entre la capacité en ampères-heures et l’énergie échangée ou stockée. En revanche, lorsque le système fonctionne sous une tension fluctuante ou lorsqu’on compare des systèmes de tensions différentes, cette grandeur peut être trompeuse.
Les unités de mesure de puissance
Comme indiqué précédemment, la puissance est quantifiée en watts (ou ses multiples). Une autre grandeur de puissance courante, utilisée principalement dans le milieu du transport est le « cheval-vapeur ».
Avant le XIXᵉ siècle, on pouvait facilement se représenter la puissance que peut produire cet animal, dont la force était couramment employée pour déplacer des charges. On pouvait ainsi quantifier le nombre d’animaux nécessaires au fonctionnement d’une machine. Lors du développement des premiers moteurs (machines à vapeur), une équivalence a été déterminée pour quantifier la puissance des machines développées. Le cheval-vapeur (noté « ch ») a donc été défini, avec l’équivalence :
1 cheval-vapeur = 735 watts
Cette puissance correspond à la puissance moyenne qu’un cheval peut transmettre sur un temps assez long. Actuellement les puissances des voitures peuvent s’étendre de quelques dizaines de chevaux-vapeur (comme sur l’exemple de la figure ci-dessus) pour une petite citadine, à plus de 1 000 chevaux-vapeur pour de puissantes voitures de sport.
Le volt-ampère (noté « VA ») est également une unité de puissance. C’est sous cette unité que la puissance souscrite sur un abonnement électrique (soit la puissance maximale du compteur électrique) est quantifiée. Le volt-ampère ne quantifie pas une puissance réellement consommée, mais correspond à la puissance maximale pouvant être échangée, avec l’équivalence :
1 kilovolt-ampère = 1 kilowatt et 1 volt-ampère = 1 watt
Si on reprend l’analogie de la consommation d’eau, il s’agit ici du « diamètre du tuyau »… Par conséquent, lorsque la puissance appelée par un foyer est supérieure à la puissance du compteur (en volt-ampère ou kilovolt-ampère), il disjoncte. Actuellement, les puissances souscrites chez les particuliers sont généralement comprises entre 3 et 15 kilovolts-ampères.

Le watt-crête (Wc) représente également une unité de puissance. Comme pour le volt-ampère, ce n’est pas une puissance réellement produite, mais la puissance maximale productible par un panneau solaire photovoltaïque, lorsqu’il est placé dans les conditions de référence : à 25 °C et sous une irradiance solaire de 1 000 W par mètre carré de panneau solaire. Au cours d’une année de fonctionnement, ce panneau produira donc à chaque instant une puissance variant entre 0 watt et sa « puissance crête » en fonction des conditions dans lesquelles il est placé, ce qui représentera au total une certaine quantité d’énergie annuelle.
Cette « puissance crête » pour un panneau solaire photovoltaïque est appelée « capacité nominale » pour d’autres systèmes, comme les chaudières au fioul ou les centrales nucléaires par exemple, qui, elles également, produisent à chaque instant une puissance potentiellement différente en fonction des contraintes extérieures.
Finalement, énergie et puissance sont deux grandeurs intimement liées, et elles sont toutes les deux nécessaires à la définition et à la mise en œuvre des systèmes énergétiques.
Nolwenn Le Pierrès ne travaille pas, ne conseille pas, ne possède pas de parts, ne reçoit pas de fonds d'une organisation qui pourrait tirer profit de cet article, et n'a déclaré aucune autre affiliation que son organisme de recherche.
10.06.2026 à 11:20
Première scientifique : nous avons réussi à enregistrer l’activité cardiaque d’un rorqual commun en liberté
Aurélie Célérier, Enseignante Chercheuse en Biologie du Comportement au CEFE, Université de Montpellier; Centre national de la recherche scientifique (CNRS)
Angelo Torrente, Chargé de recherche CNRS en Physiologie Cardiaque à l'IGF, Université de Montpellier; Centre national de la recherche scientifique (CNRS)
Bertrand Bouchard, Vétérinaire et Chercheur en Physiologie et Écologie des cétacés, Université de Montpellier; Centre national de la recherche scientifique (CNRS)
Texte intégral (2331 mots)
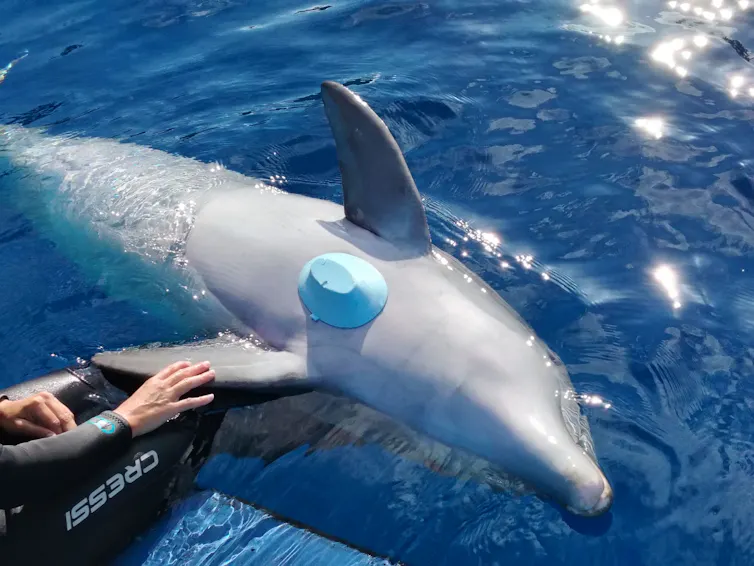
Que se passe-t-il dans le cœur d’une baleine lorsqu’elle plonge en apnée ? En août 2025, au cours d’une mission en mer Méditerranée, nous avons pu enregistrer, pour la première fois, l’activité cardiaque d’un rorqual commun, l’un des plus grands animaux de la planète (20 mètres de long, 70 tonnes). Cela a été rendu possible grâce à un nouveau dispositif permettant l’enregistrement d’un électrocardiogramme (ECG), fixé sur son dos à l’aide de ventouses.
Les premières analyses de cet ECG de cinq heures révèlent que la fréquence cardiaque de ce géant des mers peut ralentir jusqu’à 5 battements par minute (bpm) en profondeur, et culminer à 25 bpm lors des phases de respiration en surface. Ces variations extrêmes leur permettent d’économiser l’oxygène lors des plongées, ce qui en fait l’un des champions de l’apnée (jusqu’à vingt minutes). Cette avancée ouvre d’immenses perspectives pour étudier la physiologie des cétacés et contribuer à les protéger face aux perturbations humaines.
Il en aura fallu de la ténacité, de l’astuce et du travail acharné pour aboutir à cette avancée méthodologique majeure ! Et, comme souvent en sciences, ces découvertes sont issues de chemins de traverse. Au départ, nos travaux portaient sur l’étude de la communication chimique chez les cétacés.
En effet, s’il est admis que ces mammifères marins sont des êtres essentiellement acoustiques, utilisant les sons pour percevoir leur monde, leur usage des autres sens demeure largement mystérieux. Nous cherchons donc à savoir si les dauphins et les baleines perçoivent et utilisent les odeurs et les goûts (dans l’air ou dans l’eau) pour trouver leur nourriture ou interagir avec leurs congénères.
Pour explorer cette question fondamentale, notre équipe recueille principalement des données comportementales et acoustiques qui permettent de décrire comment ces animaux réagissent en présence de stimuli olfactifs ou gustatifs. Modifient-ils leur trajectoire ? Se rapprochent-ils de la source odorante ? Plongent-ils dessous ? Émettent-ils des sons particuliers ? Parfois, ces réponses sont si discrètes et subtiles qu’elles échappent à nos observations. Ainsi, des odeurs ou des goûts pourraient tout à fait être perçus sans pour autant que l’animal ne manifeste un comportement ostensible et mesurable…
C’est pourquoi, depuis quelques années, nous rêvions d’un dispositif permettant d’explorer aussi leurs réponses physiologiques et notamment leur activité cardiaque, pour compléter nos mesures. Mais comment capter le signal électrique émis par le cœur d’une baleine, capable de plonger jusqu’à 500 mètres sous la surface ?
Une rencontre et le projet prend vie
La solution va prendre forme grâce à une collaboration avec Angelo Torrente (coauteur de l’article), chercheur CNRS, spécialiste de l’activité cardiaque à l’Institut de génomique fonctionnelle (IGF) de Montpellier. Depuis des années, il étudie le fonctionnement du cœur chez différents animaux de laboratoire, du poisson-zèbre à la souris.
C’est au cours d’une conférence scientifique, en avril 2021, qu’il découvre nos travaux et notre souhait d’ajouter des indices cardiaques à nos données. Les évènements s’enchaînent alors : il nous écrit, son mail disparaît, englouti dans les spams, mais il est tenace, il nous relance et finalement on se rencontre ! Débordants d’enthousiasme et d’idées, on décide de réunir nos compétences pour atteindre un objectif commun : enregistrer les battements du cœur des cétacés.
Plus facile à imaginer qu’à faire ! Au total, il faudra près de quatre ans de méticuleuses mises au point méthodologiques pour parvenir à nos fins… Nous avons mené les premiers essais sur des dauphins, des orques et des bélougas hébergés dans différents parcs zoologiques, entraînés à rester immobiles lors de protocoles médicaux.
On essaie, on échoue, on tâtonne… Chaque nouvelle tentative nous pousse à plus d’inventivité, et Angelo développe patiemment de nouvelles compétences originales : sculpteur de silicone et soudeur d’électrodes. Après deux premières années d’efforts, un dispositif d’enregistrement d’électrocardiogramme (ECG) non invasif est enfin fonctionnel et fiable. Il permet d’enregistrer avec une précision quasi médicale l’activité cardiaque des cétacés en conditions contrôlées en parcs zoologiques, et de vérifier que cette activité varie selon le contexte. Par exemple, elle ralentit pendant les périodes d’apnée ou quand ils reçoivent une récompense alimentaire.
C’est une avancée importante, mais reste à franchir le pas décisif : adapter ce système aux contraintes bien plus importantes et imprévisibles du travail en mer, sur des grands cétacés sauvages évoluant dans leur milieu naturel. Car mesurer les changements de fréquence cardiaque pourrait permettre de mieux comprendre comment ces espèces emblématiques, pour la plupart menacées, perçoivent leur environnement de plus en plus perturbé par les activités humaines.
Le difficile passage au milieu naturel
Nous décidons alors d’intégrer notre capteur cardiaque dans une balise multicapteurs déjà utilisée pour étudier les grands cétacés, et capable d’enregistrer simultanément les mouvements en 3D, la profondeur, les sons et la vidéo. Plusieurs missions sont alors programmées, avec différents partenaires scientifiques compétents et enthousiastes, à Madagascar et à Maui pour étudier les baleines à bosse en période de reproduction. Lors de ces missions, nous rencontrons de nouveaux écueils : conditions météo défavorables, animaux peu visibles et fuyants, problèmes techniques inattendus.
À cela s’ajoute la difficulté de retrouver nos précieuses balises ECG après leur détachement, avec le risque de les perdre avant même de pouvoir accéder aux données enregistrées… Cette mésaventure se produira d’ailleurs à deux reprises à cause de la pression extrême exercée à grande profondeur. Pendant près d’un an, les enregistrements que nous obtenons ne révèlent aucun signal d’ECG exploitable. Notre moral est parfois mis à rude épreuve… mais on persiste !
C’est ainsi qu'en août 2025, nous embarquons à bord du Blue Panda, le navire du Fonds mondial pour la nature (WWF), pour une mission au large des côtes du Var consacrée aux rorquals communs de Méditerranée. Un matin, depuis le zodiac et à l’aide d’une perche de 6 mètres, nous parvenons à ventouser notre balise de dernière génération sur le dos d’une femelle d’environ 16 mètres. Grâce au signal qu’il émet en surface, nous localisons puis récupérons notre précieux dispositif, flottant après son détachement, le jour même peu avant la tombée de la nuit.
Le téléchargement interminable des données, suivi par Angelo jusque tard dans la nuit, s’achève enfin et révèle… un signal ECG d’une durée de cinq heures, parfaitement exploitable ! Il est 4 heures du matin, mais Angelo n’hésite pas à tous nous réveiller pour partager la joie de découvrir ces images inédites reflétant les palpitations du cœur de la baleine.

Dans les semaines qui suivent, en explorant chaque seconde de cet ECG, nous décrivons toutes les variations du rythme cardiaque de cette baleine. Nous les croisons ensuite avec les données de la balise multicapteurs pour relier ces changements aux différentes phases de plongée. Nos analyses révèlent une bradycardie extrême dès la descente, le cœur passant de 25 à moins de 5 battements par minute entre la surface et 40 mètres de profondeur. À l’inverse, une tachycardie (augmentation du rythme, jusqu’à 25 battements par minute) s’observe lors des efforts locomoteurs, mais aussi lors d’interactions avec d’autres baleines ou d’exposition à des sources de bruit, y compris notre propre zodiac.
Nous réalisons alors que mesurer l’activité cardiaque des grands cétacés pourrait permettre d’aller bien au-delà de la seule description des mécanismes d’adaptation à la plongée. Cette méthode offre un moyen de quantifier plus directement la façon dont ces animaux réagissent à leur environnement, notamment au stress généré par le trafic maritime et le bruit sous-marin. Elle vient ainsi compléter les observations comportementales, parfois difficiles à interpréter, en donnant un accès direct à la physiologie de l’animal et à ses dépenses énergétiques. À terme, suivre le fonctionnement du cœur de ces grands apnéistes peut devenir un outil précieux pour identifier plus objectivement les situations de stress. Nous espérons que cela pourra contribuer à orienter les mesures de protection des cétacés, à l’heure où l’océan se transforme de plus en plus en une dangereuse et assourdissante autoroute.
Ces avancées scientifiques n’auraient pas été possibles sans les précieuses collaborations scientifiques et les appuis logistiques de Denis Ody du WWF, Lars Bedjer du Marine Mammal Research Program de l’Université de Hawaiʻi, Simon Benhamou et Marie-Pierre Dubois du CEFE-CNRS, Isabelle Charrier et Olivier Adam de l’Institut des neurosciences Paris-Saclay, Yvan Duhamel du Centre Pro3D de l’Université de Montpellier. Nous remercions également toutes les équipes des parcs et des fondations Oceanogràfic (Valence, Espagne) et Loro Parque (Tenerife, Espagne) et de l’association CETAMADA pour leur accueil et leur support technique.
Aurélie Célérier a reçu des financements de l'ANR (ANR-21-CE02-0020) et Programme de Soutien à la recherche de l'Université de Montpellier
Angelo Torrente a reçu des financements de University of Montpellier "Soutien à la Recherche, programme d’excellence I-site" pour bourse PostDoctoral, le CNRS appel à projet Biologie Marine et MITI et Anses pour le projets TOXMIX et OptoFish
Bertrand Bouchard ne travaille pas, ne conseille pas, ne possède pas de parts, ne reçoit pas de fonds d'une organisation qui pourrait tirer profit de cet article, et n'a déclaré aucune autre affiliation que son organisme de recherche.
10.06.2026 à 11:19
Profiteur, partageur : comment se mettent en place les rôles sociaux des individus dans un groupe ?
Philippe Faure, Directeur de recherche, Centre national de la recherche scientifique (CNRS); ESPCI Paris
Bruno Delord, Modélisation des réseaux de neurones et du comportement, Sorbonne Université
Clément Solié, Docteur en neurosciences, ESPCI Paris ; Université Paris Cité
Texte intégral (2624 mots)
Dans un groupe, les rôles de leader, de travailleur ou encore de profiteur, semblent parfois se répartir naturellement, comme si ces qualités étaient innées. De la même façon, l’idée de « leader naturel » suggère que certaines compétences seraient héritées, ce qui déterminerait notre place dans la société. Aujourd’hui, les neurosciences montrent que la distribution des rôles n’est ni purement innée ni purement situationnelle : le hasard des premières interactions fait diverger les stratégies individuelles et, une fois adoptés, ces rôles s’inscrivent dans le cerveau et persistent.
Un profiteur ne l’est pas par nature – il faut notamment qu’un profiteur ait quelqu’un de qui profiter. Comme tout le monde ne peut être profiteur en même temps, le rôle est contraint par le groupe et n’existe que par sa relation à l’autre. Mais si les rôles de chaque individu au sein d’un groupe ne sont ni prédestinés, ni purement liés à des situations ponctuelles, alors comment se distribuent-ils ? Autrement dit, qui devient quoi et pourquoi ? Quand et comment ces rôles sont-ils stabilisés ?
Ces questions, traditionnellement traitées par les sciences sociales et l’éthologie, sont aujourd’hui abordées par les neurosciences. Celles-ci apportent un éclairage nouveau sur l’émergence de ces rôles sociaux en regardant comment ceux-ci s’expriment dans le système nerveux.
Ainsi, nos travaux, publiés en avril dans Nature, mettent en évidence qu’un rôle social – profiteur, travailleur, collaborateur – ne préexiste pas à l’individu et ne se réduit pas non plus à une situation. Nous montrons que ces rôles émergent d’un faisceau d’interactions où le hasard joue un rôle initial décisif ; et que ce n’est qu’après qu’il s’inscrit dans la structure et l’activité du cerveau, ce qui lui confère une stabilité remarquable.
En d’autres termes, l’émergence des rôles sociaux a une nature double : elle est contingente à l’origine, puis persistante.
La dynamique d’émergence des rôles remet en question deux idées reçues : la rigidité des structures sociales, dont les systèmes de castes chez les insectes sont souvent cités comme exemples emblématiques, et le déterminisme individuel, incarné par les théories qui font de la sélection de compétences génétiquement déterminées le moteur inévitable de l’émergence des rôles sociaux.
Coopération et compétition chez les souris
Pour aborder ces questions, il nous a fallu combiner des approches comportementales permettant d’observer et de quantifier les comportements de souris en continu pendant plusieurs jours et des approches théoriques pour essayer d’expliquer les mécanismes sous-jacents et enfin des enregistrements neurophysiologiques mesurant l’activité cérébrale.
Pour analyser les comportements des souris, nous avons utilisé une large arène carrée possédant plusieurs compartiments avec chacun leur spécificité : consommation d’eau, de nourriture ou nid de repos. Les souris sont génétiquement identiques, du même âge, élevées dans des conditions standardisées et aucune n’a d’expérience préalable de la tâche. Pour se nourrir, une souris devait collecter une centaine de granulés de nourriture par jour, libérés un par un en appuyant sur un levier situé à quelques secondes de déplacement. Toutes les souris, que ce soit seules ou en groupe, apprennent la tâche en quelques heures. Un système de suivi vidéo en continu et d’identification automatique permet d’enregistrer chacun des déplacements pendant des semaines sans nécessiter la présence d’un observateur, préservant ainsi le cycle naturel d’activité nocturne des souris.
Chez les animaux placés seuls dans la cage, deux stratégies émergent. Certains appuient et collectent la nourriture dans la foulée, d’autres laissent les granulés s’accumuler avant de les consommer plus tard. Les femelles accumulent un peu plus que les mâles, cependant cette différence est modeste, rien qui n’annonce réellement les rôles sociaux que nous avons observés en groupe.
Lorsque les animaux sont plusieurs dans la cage, avec un même levier et un distributeur, ils se trouvent dans la situation de devoir ajuster leur comportement les uns par rapport aux autres. Une division du travail peut alors apparaître. C’est ce qu’on observe avec trois souris, situation dans laquelle des changements de comportement radicaux s’opèrent et où les rôles sociaux apparaissent.
Tous les animaux se nourrissent à leur faim, mais certains – les profiteurs – ne pressent que très peu le levier relativement à leur consommation, d’autres appuient beaucoup plus qu’ils ne consomment (les travailleurs) et enfin certains accumulent (les accumulateurs). Ces trois profils ne sont pas distribués au hasard dans les cages : les travailleurs cohabitent avec les profiteurs, formant une organisation sociale différenciée régie par la compétition, tandis que les accumulateurs vivent entre eux au sein d’une organisation non compétitive. Cette différence tient au couplage entre appui et consommation : dans la condition compétitive, celui qui appuie veut manger immédiatement, ce qui crée la rivalité et la possibilité qu’un congénère présent à proximité du distributeur lui prenne le granulé. Dans la condition non compétitive, les deux sont découplés – chacun appuie quand il veut, mange quand il veut, sans course à la nourriture, encore faut-il que l’ensemble du groupe adopte cette stratégie.
De manière surprenante, cette double organisation, compétitive ou non, est associée au sexe des animaux : 75 % des triades femelles sont uniformes et accumulent, alors que 76 % des triades mâles montrent des structures compétitives avec à la fois des profiteurs et des travailleurs. On est loin des petites différences entre mâles et femelles que l’on voyait lorsque les animaux étaient placés seuls dans la tâche.
Quand le cerveau libère de la dopamine
De plus, les enregistrements de l’activité des neurones dopaminergiques de l’aire tegmentale ventrale révèlent que chaque rôle est associé à une signature neurale distincte. Pour comprendre cela, il faut rappeler que les neurones dopaminergiques signalent les récompenses par une augmentation transitoire de leur activité – ce signal permet à un individu de savoir si un événement vaut la peine d’être appris ou recherché.
Ainsi, chez les travailleurs, une augmentation de l’activité dopaminergique accompagne leur propre appui sur le levier une fois le rôle installé. Chez les profiteurs en revanche, ce même signal survient lorsqu’un congénère appuie sur le levier. Le cerveau du profiteur a donc appris que le travail d’autrui, et non le sien, prédit l’obtention de nourriture. Ce premier signal montre que les rôles sont ancrés par un mécanisme de renforcement expliquant ainsi que, une fois établis, les rôles ne s’échangent pas d’un jour à l’autre.
Par ailleurs, l’activité dopaminergique au repos est plus élevée chez les mâles que chez les femelles à l’issue de l’expérience, une différence absente avant la vie en groupe. Ceci reflète l’empreinte neuronale laissée par la tâche et la différenciation du fonctionnement cérébral.
Un modèle pour différencier les stratégies menant aux rôles sociaux
Un modèle computationnel d’apprentissage par renforcement révèle un mécanisme sous-jacent.
Le fonctionnement de ce modèle dépend d’un « paramètre d’exploitation » β, mesurant le degré d’exploitation d’une action connue comme gagnante – ici, presser le levier pour manger immédiatement – par opposition à la poursuite d’une exploration des autres possibilités. Un β faible indique un animal peu pressé, qui continue à tester d’autres options ; un β élevé reflète au contraire un engagement marqué dans la séquence levier-nourriture.
Le modèle montre, qu’en fonction de β, différentes stratégies de groupe émergent. Si β est faible, les animaux ne se spécialisent pas et ont tous la même stratégie d’accumulation – ce qu’on observe chez les femelles. Au contraire, si β est élevé, les individus se spécialisent spontanément, au travers de ce que l’on appelle une brisure de symétrie : les individus n’ont d’autre choix que de se spécialiser et d’être soit travailleur, soit profiteur. C’est ce qu’on observe chez les mâles.
Cette spécialisation se produit même si les individus sont parfaitement identiques et partagent le même β : ce sont les contingences des premières interactions qui décident qui deviendra travailleur et qui deviendra profiteur. Imaginons deux mâles identiques au β élevé placés ensemble pour la première fois. Par hasard, l’un atteint le distributeur de nourriture quelques secondes avant l’autre. Cette légère avance suffit : son cerveau associe la séquence aller au distributeur à une récompense, renforçant sa tendance à reproduire ce comportement. L’autre, arrivé trop tard, trouve la nourriture déjà consommée et se tourne vers le levier pour en produire lui-même. En quelques cycles, l’un est devenu profiteur, l’autre travailleur. Non pas parce qu’ils étaient différents au départ, mais parce que le hasard d’un premier instant a enclenché deux boucles de renforcement divergentes. Chez les femelles, un β faible signifie qu’aucun individu ne s’engage assez fortement dans la séquence levier-nourriture pour qu’une rivalité s’installe. Toutes restent dans le découplage temporel entre appui et consommation, et le groupe converge vers l’uniformité.
Ce résultat invite à reconsidérer l’idée que les rôles sociaux reflètent des qualités individuelles préexistantes. C’est le groupe qui fabrique les différences de rôles, pas l’inverse. Enfin, ce modèle pose la question du support biologique du paramètre β.
Faire basculer les rôles : du contexte social à la dopamine
Nous avons testé cette idée plus précisément au travers d’expériences supplémentaires.
Une première série d’expériences nous a permis de montrer que le contexte social est important. Si deux femelles sont installées avec un mâle, le comportement du groupe est compétitif. Les mâles sont préférentiellement des profiteurs et les femelles se partagent entre profiteurs et travailleurs. Le profil d’accumulateurs que les femelles adoptent spontanément lorsqu’elles sont entre elles n’est donc pas fixé par avance. Les femelles peuvent adopter des comportements coopératifs ou compétitifs, selon le contexte.
La dopamine est un des paramètres qui contrôle ce seuil entre groupes différenciés compétitifs et groupes homogènes. Lorsqu’on manipule l’activité des neurones dopaminergiques par optogénétique, avant de placer les souris dans la tâche, les structures sociales qui émergent s’en trouvent modifiées. Inhiber l’activité dopaminergique chez des triades femelles suffit à faire apparaître une compétition et une différenciation comparables à celles observées chez les mâles ; à l’inverse, l’augmenter chez les mâles efface leur différenciation et fait converger le groupe vers un profil uniforme.
Ce double résultat révèle une asymétrie instructive : ce que l’on mesure naturellement après la tâche – un tonus dopaminergique plus élevé chez les mâles – reflète l’empreinte de la spécialisation acquise ; ce que l’on fait artificiellement avant la tâche modifie la capacité du système à se différencier, et ce dans le sens inverse de ce qu’on pourrait naïvement attendre. Ce qui compte n’est pas tant le niveau global de dopamine, que la capacité du système dopaminergique à signaler des événements précis. Cette capacité est altérée précisément par la modulation du niveau global de dopamine. L’activité dopaminergique agit ainsi sur le β, réglant non seulement le comportement individuel, mais aussi l’aptitude du groupe à se diversifier.
En somme, le rôle au sein d’un groupe n’est ni une propriété de l’individu ni un effet pur de situation. C’est un état dynamique, entretenu par une boucle entre l’expérience sociale et l’activité du cerveau. Les rôles sont distribués au travers d’une émergence collective, et non pas a priori. Cette double propriété, flexible à l’origine, durable à l’arrivée, fait écho à ce que l’on observe sans doute, au-delà des souris, dans de nombreux systèmes sociaux.
Si l’on veut comprendre pourquoi certaines positions sociales perdurent, il faudra peut-être chercher non pas du côté des individus seuls, mais plutôt des boucles de relations causales qu’entretiennent l’activité des cerveaux individuels et les interactions collectives.
Les projets VarSeek : Bases neurales de la variabilité dans les stratégies de recherche de récompense et conséquences pour la susceptibilité à la nicotine et Social-VIP : Organisation sociale et variabilité individuelle dans l’adaptation neuronale et la vulnérabilité psychiatrique sont soutenus par l’Agence nationale de la recherche (ANR), qui finance en France la recherche sur projets. L’ANR a pour mission de soutenir et de promouvoir le développement de recherches fondamentales et finalisées dans toutes les disciplines, et de renforcer le dialogue entre science et société. Pour en savoir plus, consultez le site de l’ANR.
Philippe Faure ne travaille pas, ne conseille pas, ne possède pas de parts, ne reçoit pas de fonds d’une organisation qui pourrait tirer profit de cet article, et n’a déclaré aucune autre affiliation que son poste au CNRS. Son équipe de recherche a reçu des financements de la Fondation pour la Recherche Médicale (FRM), de l’Agence Nationale de la Recherche (ANR-25-CE37-6088-01 Social-VIP, ANR-23-CE37-0017-01 VARSEEK), de l’IReSP et de l’INCa.
Bruno Delord ne travaille pas, ne conseille pas, ne possède pas de parts, ne reçoit pas de fonds d’une organisation qui pourrait tirer profit de cet article, et n’a déclaré aucune autre affiliation que son poste à Sorbonne Université. Son équipe de recherche a reçu des financements de l’Agence Nationale de la Recherche (ANR): ANR VarSeek
Clément Solié a reçu des financements de la Fondation pour la Recherche Médicale (FRM) et de la Fondation des Treilles.
- GÉNÉRALISTES
- Ballast
- Fakir
- Interstices
- Issues
- Korii
- Lava
- La revue des médias
- Time France
- Mouais
- Multitudes
- Positivr
- Regards
- Slate
- Smolny
- Socialter
- UPMagazine
- Le Zéphyr
- Idées ‧ Politique ‧ A à F
- Accattone
- À Contretemps
- Alter-éditions
- Contre-Attaque
- Contretemps
- CQFD
- Comptoir (Le)
- Déferlante (La)
- Esprit
- Frustration
- Idées ‧ Politique ‧ i à z
- L'Intimiste
- Jef Klak
- Lignes de Crêtes
- NonFiction
- Nouveaux Cahiers du Socialisme
- Période
- ARTS
- L'Autre Quotidien
- Villa Albertine
- THINK-TANKS
- Fondation Copernic
- Institut La Boétie
- Institut Rousseau
- TECH
- April - Libre à lire
- Dans les algorithmes
- Framablog
- Goodtech.info
- Quadrature du Net
- Revue Eur. Médias et Numérique
- INTERNATIONAL
- Alencontre
- Alterinfos
- Gauche.Media
- CETRI
- ESSF
- Inprecor
- Guitinews
- MULTILINGUES
- Kedistan
- Quatrième Internationale
- Viewpoint Magazine
- +972 mag
- PODCASTS
- Arrêt sur Images
- Le Diplo
- LSD
- Thinkerview